
首页 » 锟斤拷锟叫斤拷展
传统的防弹衣、护膝等个人防护材料是由金属、陶瓷、硬塑料等刚性材料制成的,具有坚硬、不灵活和笨重等缺点。而研制柔性化、轻量化的新型可穿戴个人防护材料已成为目前研究的热点。增稠流体,如聚硼硅氧烷,在低应变速率下表现为粘性流体,但在高应变速率下表现为弹性固体,具有典型的增稠特性。这种从低粘度到高粘度的可逆转变是通过动态共价键(如B-O键)的可逆缔合/解离过程实现的,并产生高能量损耗,使得聚硼硅氧烷具有优异的粘弹性和能量损耗特性。但由于缺乏永久性交联网络和橡胶弹性,聚硼硅氧烷在室温下会随着时间而逐渐流动,变形后无外力协助无法恢复原状。而要充分利用聚硼硅氧烷增稠性和能量吸收性能,需将其置于受限环境中形成“硬包软”结构中。猫掌的多级蛋白纤维网状结构与脂肪团簇的高度形变配合而使其具备超常的抗冲击和减震吸能性能,这类精细的生物结构为柔性仿生防护材料的研制提供了新的设计思路。
近日,浙江大学彭华新教授、秦发祥研究员团队与英国布里斯托大学Fabrizio Scarpa教授团队合作首次在猫掌仿生多级网状结构复合材料及其高能耗应用方面取得了新进展。对于生活在复杂地形和丛林地带并善于奔跳的猫科动物,已进化出对外界环境具有很强适应性的缓冲机体,具有良好的抗冲击性和缓冲能力。其中最为典型且为我们熟悉的猫,其从高处坠落,无论最初姿势如何,它都能利用自身的身体平衡调节机能,最终调整翻转过来,四脚着地,安然无恙,也因此被人称为“不死猫”。这是因为猫的足下长有一层厚厚的猫掌“肉垫”,在与地面最先冲击接触时,肉垫软组织发生变形,在此过程中耗散能量,缓冲减震,对足部骨骼和其他肢体能够起到有效的保护作用。如图1所示,猫掌具有明显的三层生物组织结构:表皮组织,真皮组织和皮下组织,其中最厚最柔软的皮下组织层是猫掌中最重要的能量吸收层。皮下组织含有大量的脂肪,而脂肪被坚固的胶原纤维和弹性纤维构成的三维网状结构分隔成许多大叶腔室,后者又被纤维小膜进一步分割成许多小叶。

图1 猫掌的多级网状生物结构及该种仿生复合材料的制备示意图。
受此猫掌皮下组织的多级网状结构启发, 研究者采用具有良好柔性和生物相容性的开孔聚氨酯(PU)泡沫作为一级网状骨架,并通过浸涂包覆氧化石墨烯/多壁碳纳米管(GO/MWCNTs)外壳层以增强骨架的整体力学支撑作用;随后采用冷冻干燥技术引入GO/MWCNTs次级网状结构,此结构将一级网状骨架结构内的大腔室通道分割成次级小腔室;最后,选取类脂聚合物聚硼硅氧烷(PBDMS)为填充基体,经过自动冷流完全灌充整个复合泡沫,待稀释剂乙醇挥发除尽后,最终成功制备了高阻尼高能耗的猫掌仿生超复合材料(如图2)。研究者探索了该仿生复合材料在柔性防护、减震、缓冲等方面的应用,并利用有限元模拟探究了基于该多级网状结构下的微观耗能机理。
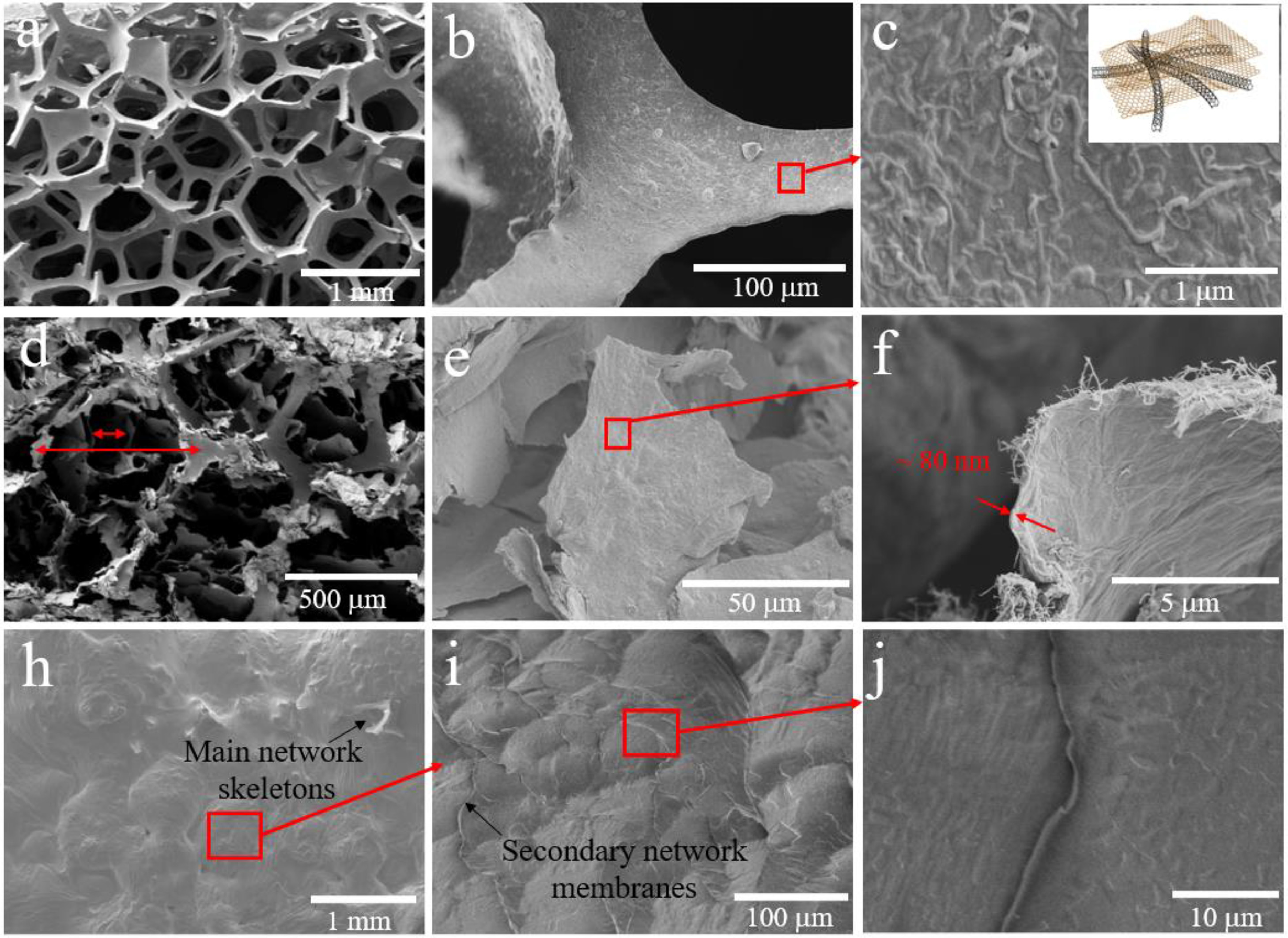
图2 猫掌仿生多级网状结构复合材料在不同制备步骤下的微观形貌。
动物脚掌和人体足跟部等相关研究表明,为了适应不同复杂运动,脚掌肉垫应具备以下几点特性:(1)具有一定的柔性以减缓冲击,(2)具有一定的刚度以传递地面支撑力,(3)具有一定的阻尼以耗散能量,(4)具有一定的弹性以恢复原样。因此在复合材料设计过程中,研究者通过对PU泡沫主网状骨架表面进行了GO/MWCNTs混合物的涂覆增强。如图3所示,由于进行了主网状骨架PU的有效增强,该网络骨架作为稳定的力学支撑能使最终的仿生复合材料具有很好的抗蠕变性、保压性、回弹性及强度等综合力学性能。

图3 猫掌仿生多级网状结构复合材料的力学性能。
研究者对仿生复合材料进行了准静态循环压缩和动态载荷下的相关综合性能分析,发现静态和动态能耗性能都得到了大幅提升,特别是动态载荷下的减震隔振性能相较于聚硼硅氧烷基体提升了近160%(图4),冲击缓冲性能提升了近40%,冲击能吸收率更是高达100%(图5)。该仿生复合材料对高处自由落体鸡蛋具有明显的保护效果,更为直观地说明了所制备的多级网状结构仿生超复合材料具有优异的冲击吸能和隔振性能,可作为防护材料而应用于实际中。

图4 猫掌仿生多级网状结构复合材料的隔振减振性能。
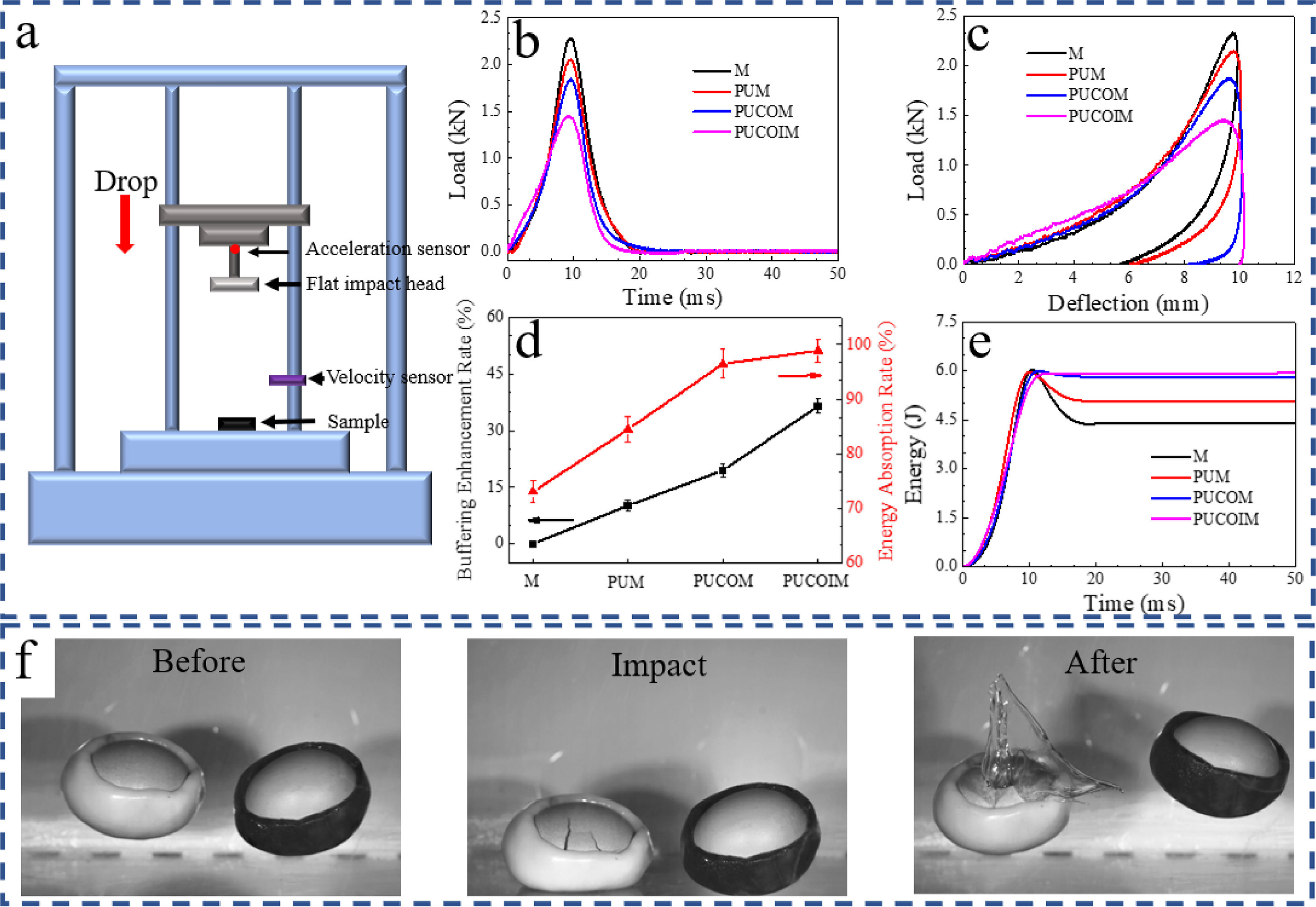
图5 猫掌仿生多级网状结构复合材料的冲击吸能性能。
为了更深入地理解多级网状结构仿生超复合材料在微观结构层面的能量耗散机制,研究者利用ANSYS 软件建立了基于代表性体积元(RVE)建模方法和周期边界条件的有限元模型(图6)。模型重点研究了多级网状结构(即引入次级网状结构)对复合材料整体力学性能和能量损耗机制的影响。计算结果表明当复合材料受压缩载荷时,应力主要集中分布于一级主网状结构骨架上,而应变和能量密度则主要出现在聚硼硅氧烷基体区域。这是因为网状主骨架(“硬”相)的弹性模量大于聚硼硅氧烷柔性基体(“软”相)。在这种模量配比下,网状主骨架承载了主要的外加压缩载荷,而其间填充的基体相对应地承担了主要的外加变形,并表现为高弹性应变能密集区。其中每一个结构单元可视为一个“硬包软”的微型静液压系统,当受到外力作用时,网络结构紧密或疏松程度的涨落,带动腔内的柔性聚硼硅氧烷不断形变与恢复,进而产生能量耗散性能(可逆动态高能 B-O 共价交联键)。次级网状结构的引入,使得“硬包软”的结构单元被进一步细分,进而使得多级网状结构仿生复合材料产生更为剧烈的局部应变及其更高效的能量损耗性能,提升量高达65%。
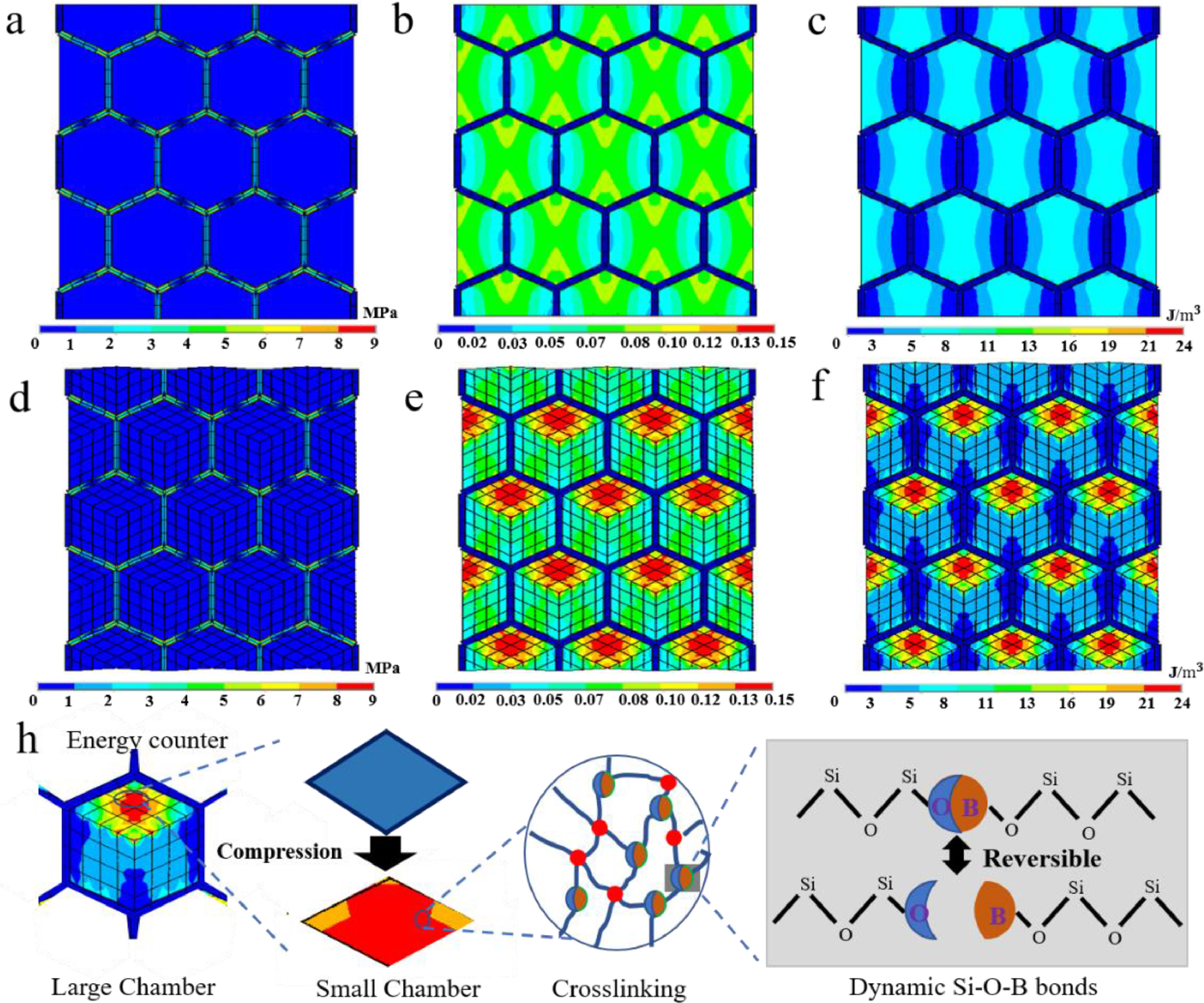
图6 有限元模型压缩载荷下的计算结果及能量损耗机理示意图。
这些研究成果加深了我们对于猫掌抗冲击减震性能的生物微结构形变耗能机制的理解,特别是引入的次级网状结构,对仿生复合材料力学性能和阻尼耗能性能起着的至关重要贡献作用。同时也为借助多级网状 “硬包软”结构为研制强韧一体化、高阻尼耗能复合材料提供了一种新的设计思路。
相关成果以“Hierarchical Network Structural Composites for Extraordinary Energy Dissipation Inspired by the Cat Paw”为题发表在Applied Materials Today上。本工作第一作者为博士生卢文江(目前在清华大学深圳国际研究生院开展博士后工作),英国布里斯托大学博士后张启程为共同一作。秦发祥研究员和彭华新教授为本文的共同通讯作者,合作作者还包括博士生陈骞、许鹏博士、王欢博士和布里斯托大学Fabrizio Scarpa教授。
原文链接:
https://doi.org/10.1016/j.apmt.2021.101222
